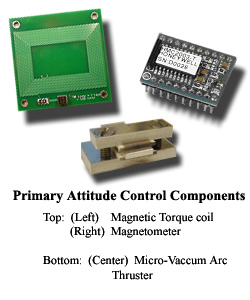
The First To... ION will be among the first CubeSats to be actively stabilized on all three-axes. The onboard magnetometer and sun sensors are used to provide the necessary information for attitude determination. Torque coils are then used to orient the spacecraft in the nadir pointing direction and perform any station keeping maneuvers. In addition to the magnetic torque coils, ION is equipped with four micro-vacuum arc thrusters capable of rotating the satellite around the x and y-axis and translation it in the z-axis.
It's Purely "Attitude"!!!
In addition, the satellite's dynamics and kinematics have also been modeled and added to this simulation creating a feedback loop. Starting with the initial attitude, the controller finds the optimum torque sequence and applies it to the simulated satellite. The response of the system is calculated and the new attitude and rotational rate are fed back into the LQR to find new optimum torque sequence. The system response is thus calculated after each torque and it is used to find an overall torque profile. Once the satellite is oriented correctly, the simulation is stopped and the entire profile is uploaded to the satellite during the next pass for execution.
Honeywell
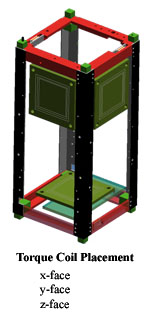
HMC2003 Magnetometer Torque Coils: Alameda Applied Sciences Corporation Micro-Vacuum Arc Thrusters Torque Coil 3-axis control of the satellite will be maintained using three orthogonal torque coils. One coil will outline the perimeter of the +x face, another will outline the perimeter of the +y face, and the third will outline the perimeter of the -z face. All three torque coils are of equal dimensions. |
|||||||||||||


 Due
to processor and engineering schedule limitations, most of the
data processing for the ACS is done on the ground. This "open
loop" system relies on the downloaded magnetometer and solar
sensor data to estimate the attitude and rotational rate at a
known time and position during any given orbit. Accurate orbit
propagators as well as detailed Earth magnetic field models have
been used to achieve the desired accuracy of these calculations.
The computed attitude information is fed into a simulation that
uses an asymptotic period linear quadratic regulator (LQR) to
find the optimum magnetic torque needed to achieve a specific
orientation.
Due
to processor and engineering schedule limitations, most of the
data processing for the ACS is done on the ground. This "open
loop" system relies on the downloaded magnetometer and solar
sensor data to estimate the attitude and rotational rate at a
known time and position during any given orbit. Accurate orbit
propagators as well as detailed Earth magnetic field models have
been used to achieve the desired accuracy of these calculations.
The computed attitude information is fed into a simulation that
uses an asymptotic period linear quadratic regulator (LQR) to
find the optimum magnetic torque needed to achieve a specific
orientation.